Handlingsysteem voor robotbehuizing

Uitdaging
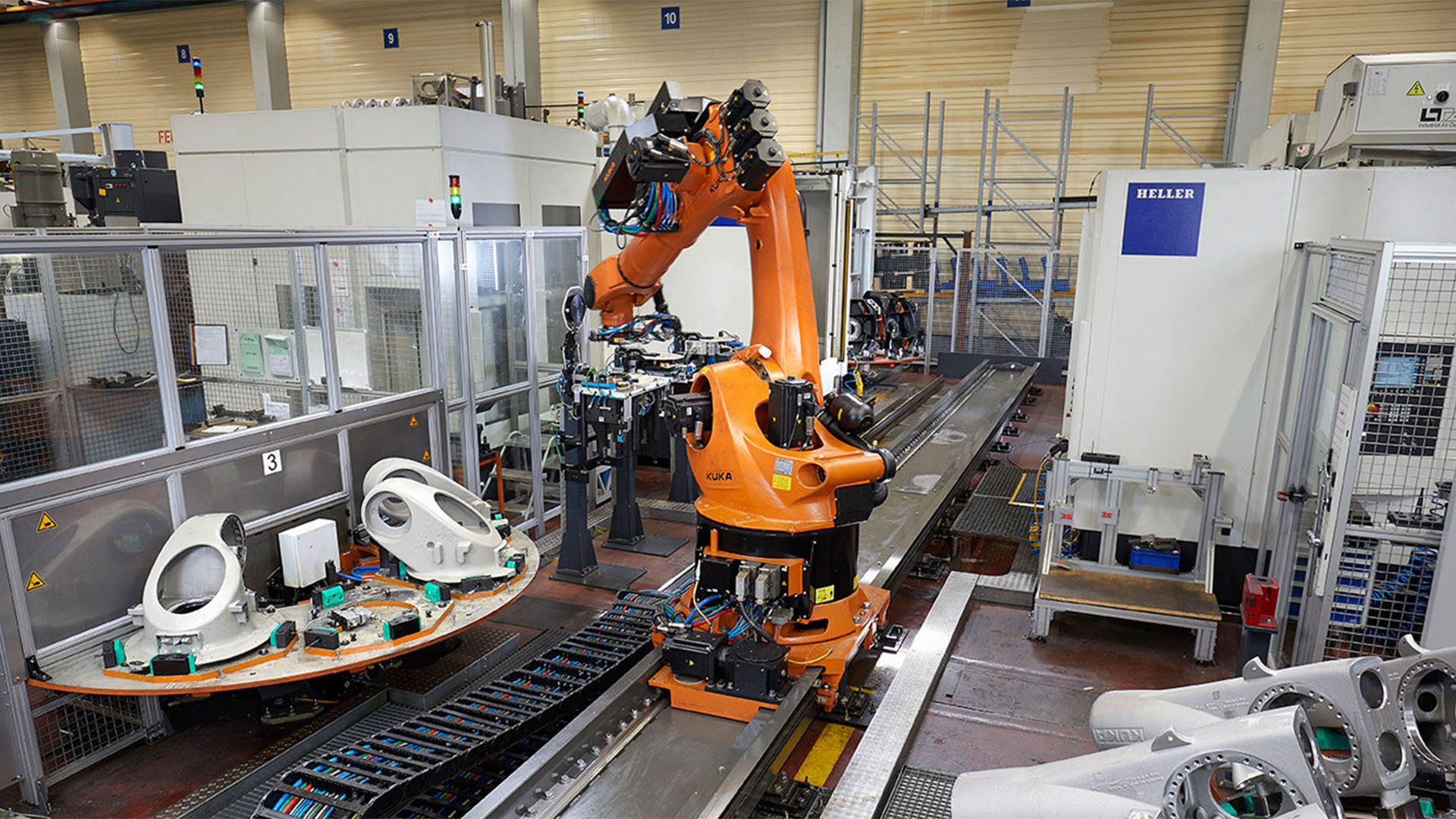
Drie bewerkingscentra moesten onderling met een robot worden verbonden. Aangezien de automatisering achteraf werd ingebouwd, was de ruimtebehoefte en dus de robotgrootte beperkt. De machines moesten ook worden gebruikt voor een zeer grote verscheidenheid aan onderdelen.
Oplossing
Vanwege de verscheidenheid aan onderdelen werd een automatische grijperwissel toegepast. De grijpers werden ontworpen met het oog op een optimaal gewicht, zodat een compacte robot kon worden gebruikt.
Highlights en technische gegevens
 IP40
IP40 Pneumatisch
Pneumatisch uitwendig grijpen
uitwendig grijpen inwendig grijpen
inwendig grijpen- Positiebehoud via klemelement
Technische gegevens
| Type aandrijving | pneumatisch |
| Grijpkracht max. | 6600 [N] |
| Grijpconcept | Vormsluiting |
| Grijpbeveiliging | Klemming |
| Slag max. | 200 [mm] |
| IP-klasse | IP40 |
| Systeemgewicht | 112 [kg] |
Standaardcomponenten geïnstalleerd